Closing in
0
...
Menu
Search
LATEST
POPULAR
AIRCRAFT FOR SALE
SECTIONS
Business Aviation
Defense
Aerospace & Air Transport
FutureFlight
Rotorcraft
General Aviation
SUSTAINABILITY & ENVIRONMENT
CHANNELS
Aircraft
Maintenance
Avionics
Charter & Fractional
Safety
All Categories
News Archive
Newsletter Archive
MORE
AIN FBO Survey
Airshows & Conventions
Aviation Events
Compliance Countdown
Expert Opinion
In-Depth Reports
Leeham News & Analysis
Print Archives
Videos
Webinars
Whitepapers
ABOUT
About AIN
Our Writers
History
Advertise
Contact Us
Subscribe
LATEST
POPULAR
AIRCRAFT FOR SALE
SECTIONS
ABOUT
Search
Subscribe
Search
Verticon 2025
Rotorcraft
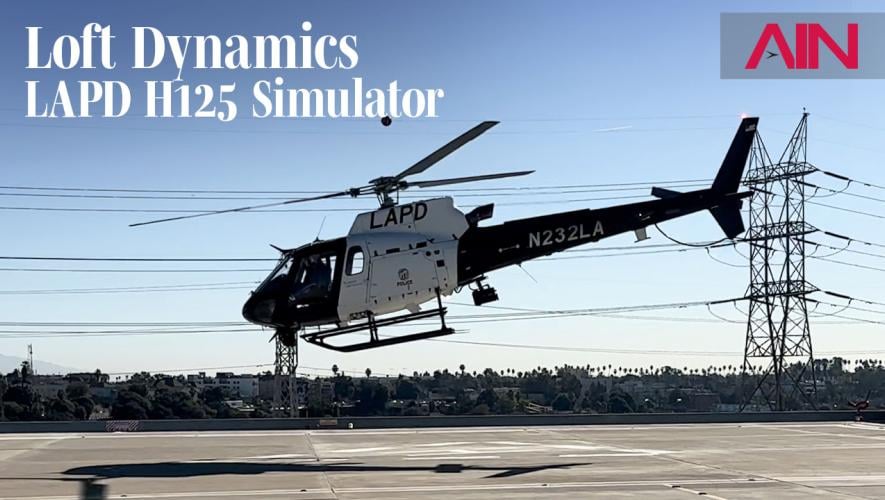
LAPD Air Unit Moves to Virtual Training
Loft Dynamics device makes emergency training much more realistic
The Loft Simulator makes it easy to create scenarios like this car chase.
Share
Post
Share
Print
Copy
Email
By
Matt Thurber
• Editor-in-Chief
March 10, 2025
More In Rotorcraft
Nigerian Medical Group Buys Two Airbus H135 Helicopters
Rotorcraft are the first HEMS-equipped H135s in Africa
Rotorcraft
Belgium Accepts First Airbus H145M Helicopter
20 units on order as part of Armed Forces and Federal Police fleet renewal plan
Rotorcraft
Flight Training in the LAPD H125 AStar Loft Dynamics Helicopter Simulator
Nearly as good as the real thing, and a lot less expensive.
Rotorcraft
Valour Study Predicts 6,824 eVTOLs In Operation By 2050
Revised expectations feature a fleet largely based in China
Rotorcraft
Airbus Secures Contract for Czech Police H145s
New twin-engine rotorcraft will replace a fleet of H135s
Rotorcraft
Avincis Orders Up to 30 Airbus, Leonardo Helicopters
Deliveries will take place from 2028 through 2031
Rotorcraft
Airbus H145 Joining Uncrewed Helicopter Arena
First flight is expected at the end of 2026 and entry into service in the early 2030s
Rotorcraft
Helicopter Express Picks TracPlus Mission Platform
System tracks and shares information with all appropriate parties
Rotorcraft